 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng ViệtTechnologie de contrôle vectoriel en boucle ouverte pour moteur à réluctance synchrone
En raison de ses avantages uniques par rapport aux moteurs asynchrones et aux moteurs synchrones à aimants permanents, il offre de bonnes perspectives d'application dans le domaine de la transmission traditionnelle et de la conduite de véhicules électriques émergents.
En termes de structure et de principe, SynRM ressemble plus à un moteur synchrone à aimants permanents sans aimants permanents. Ils ont des modèles mathématiques similaires. Par conséquent, pour le mode d'entraînement SynRM : dans le matériel, entièrement compatible avec la plate-forme d'entraînement de moteur synchrone à aimant permanent mature, réduisant le coût du système de contrôle d'entraînement de moteur à réluctance synchrone. Dans le logiciel, selon les caractéristiques du modèle mathématique du moteur à réluctance synchrone, un nouvel observateur de flux est développé pour réaliser le contrôle de découplage vectoriel de ce type de moteur. Son schéma fonctionnel de contrôle vectoriel en boucle ouverte est le suivant.
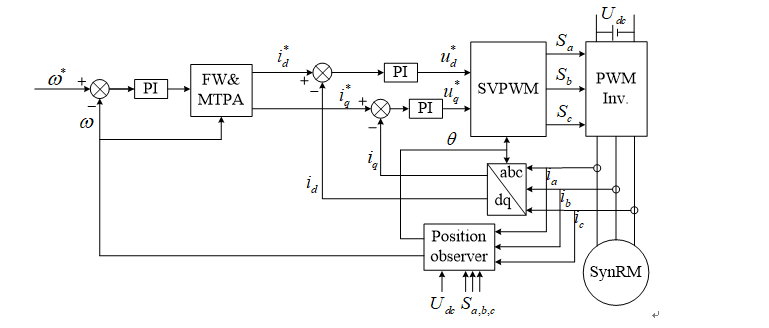
Schéma fonctionnel du contrôle vectoriel en boucle ouverte
Le contrôle vectoriel en boucle ouverte permet d'obtenir de meilleures performances dynamiques et statiques des moteurs à réluctance synchrone, mais dépend fortement des paramètres du moteur. La précision des paramètres du moteur dans le modèle affecte directement la conception raisonnable de la bande passante du contrôleur, ainsi que la précision de l'observation de la liaison de flux et de l'observation de la vitesse, qui à son tour affecte les performances de régulation de la vitesse du système. Les paramètres du moteur synchrone à réluctance sont plus sévères que ceux du moteur synchrone à aimants permanents, ce qui pose un problème de contrôle.
Compte tenu des problèmes et des caractéristiques ci-dessus, notre société a effectué des recherches et une optimisation approfondies sur la technologie de contrôle vectoriel en boucle ouverte du moteur à réluctance synchrone sur la plate-forme AC310, afin d'obtenir d'excellentes performances dynamiques et statiques. Les résultats significatifs spécifiques sont les suivants :
(1) Basé sur la principale plate-forme logicielle de contrôle vectoriel existante, le nouvel observateur de flux est utilisé pour réduire la sensibilité des paramètres du moteur, l'observation précise de la position du rotor et le découplage précis du courant.
(2) Apprentissage des nouvelles caractéristiques de saturation de l'inductance du moteur. Étant donné que SynRM repose sur le fonctionnement du couple de réluctance, le phénomène de saturation du circuit magnétique du moteur est évident et les paramètres d'inductance du moteur sont fortement affectés par la saturation du circuit magnétique. L'inductance d'axe direct Ld et l'inductance d'axe transversal Lq ne sont pas des valeurs fixes, ce qui affecte sérieusement la réponse transitoire et le contrôle précis, de sorte que les performances de contrôle du moteur ne peuvent pas être optimisées. En plus de l'auto-apprentissage conventionnel, l'AC310 a récemment développé la fonction d'apprentissage de la saturation des paramètres d'inductance, qui a un temps d'apprentissage court et une précision d'apprentissage élevée. Par apprentissage, les caractéristiques de saturation d'inductance des axes d et q du moteur peuvent être obtenues sous différents niveaux de saturation magnétique, de sorte que le moteur peut être contrôlé plus précisément. La figure ci-dessous montre la courbe d'apprentissage de la courbe de saturation de l'inductance d'un moteur synchrone à réluctance utilisé en champ réel.
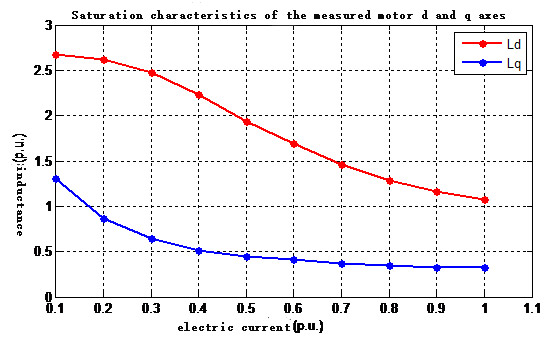
Apprentissage des nouvelles caractéristiques de saturation de l'inductance du moteur
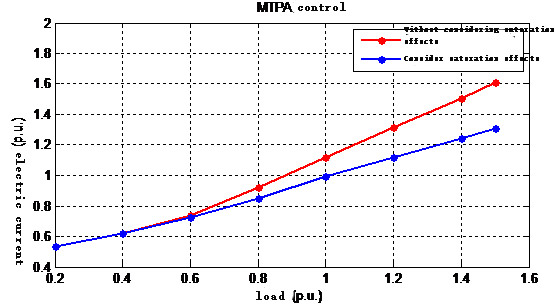
(3) Contrôle MTPA. Pour une machine synchrone à réluctance, il n'y a pas de perte de cuivre dans le rotor sans bobinage, et la perte est principalement concentrée côté stator. Le contrôle du rapport couple/courant maximum est utilisé pour répartir de manière optimale le courant du stator sur l'axe dq afin de minimiser le courant du stator, minimisant ainsi la perte de cuivre du stator pour obtenir une efficacité optimale.
Selon l'expression du couple :

Si l'inductance est considérée comme constante, lorsque θ = π / 4, la sortie de couple au même courant de stator est la plus grande. Cependant, dans le fonctionnement réel du moteur, la saturation magnétique a une grande influence sur les paramètres du moteur. A ce moment, l'angle de couple optimal θ s'écartera de π/4, et le contrôle optimal de l'efficacité ne peut pas être atteint en utilisant l'angle de courant constant de 45°. Grâce aux caractéristiques de saturation de l'inductance du moteur, la courbe MTPA est définie et l'angle de courant est automatiquement ajusté, de sorte que le contrôle d'efficacité optimal est obtenu à n'importe quelle fréquence et charge, et l'efficacité énergétique du moteur à réluctance synchrone est exercée à IE4 et au-dessus.
Contrôle MTPA
(4) Contrôle de l'affaiblissement du champ. Le moteur est soumis à un contrôle MTPA en dessous de la vitesse de base, et le contrôle d'affaiblissement de champ est effectué au-dessus de la vitesse de base pour maximiser l'utilisation de la limite de tension afin de maximiser le couple de sortie et d'étendre la plage de puissance constante.
Ce qui suit est une forme d'onde de test partielle :
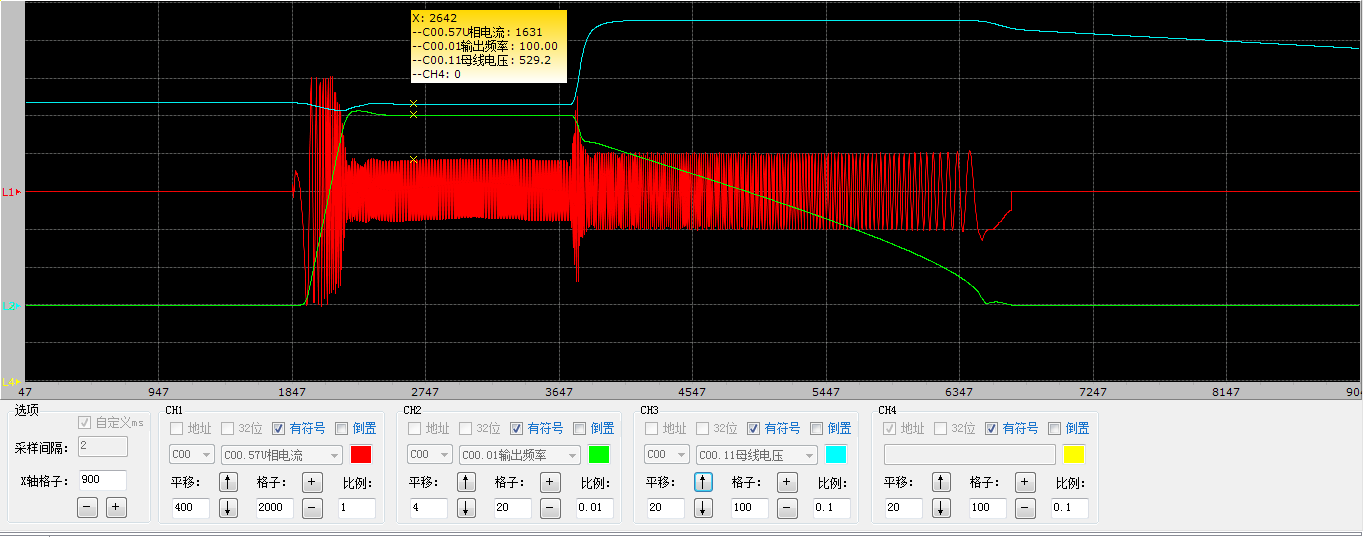
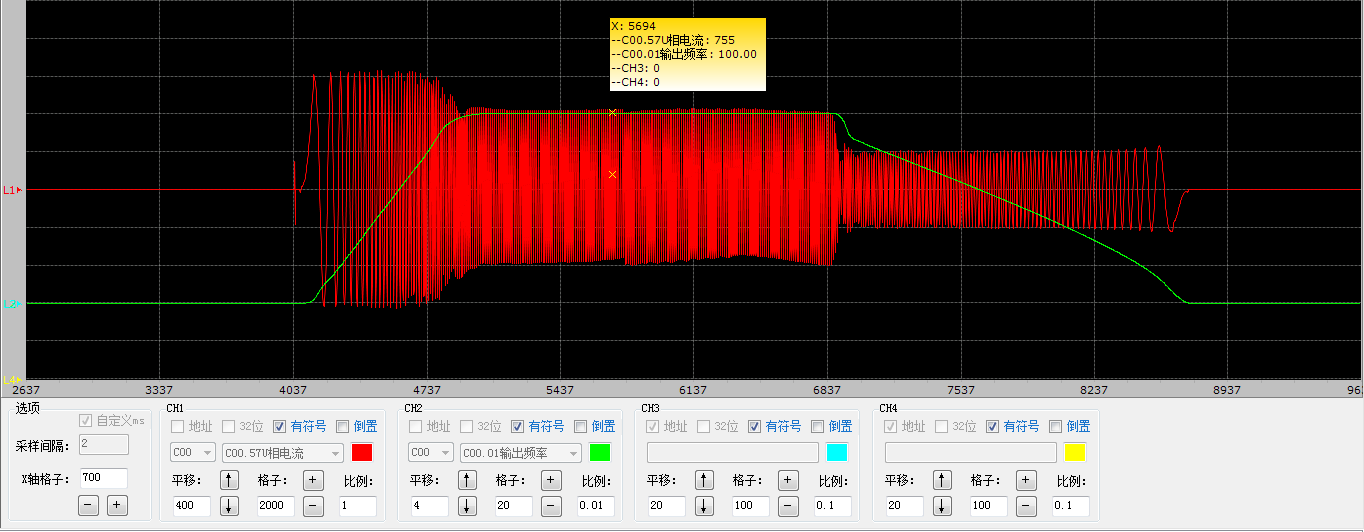
Temps d'accélération et de décélération 0,1 s, accélération à vide de 0 à la fréquence nominale et décélération rapide
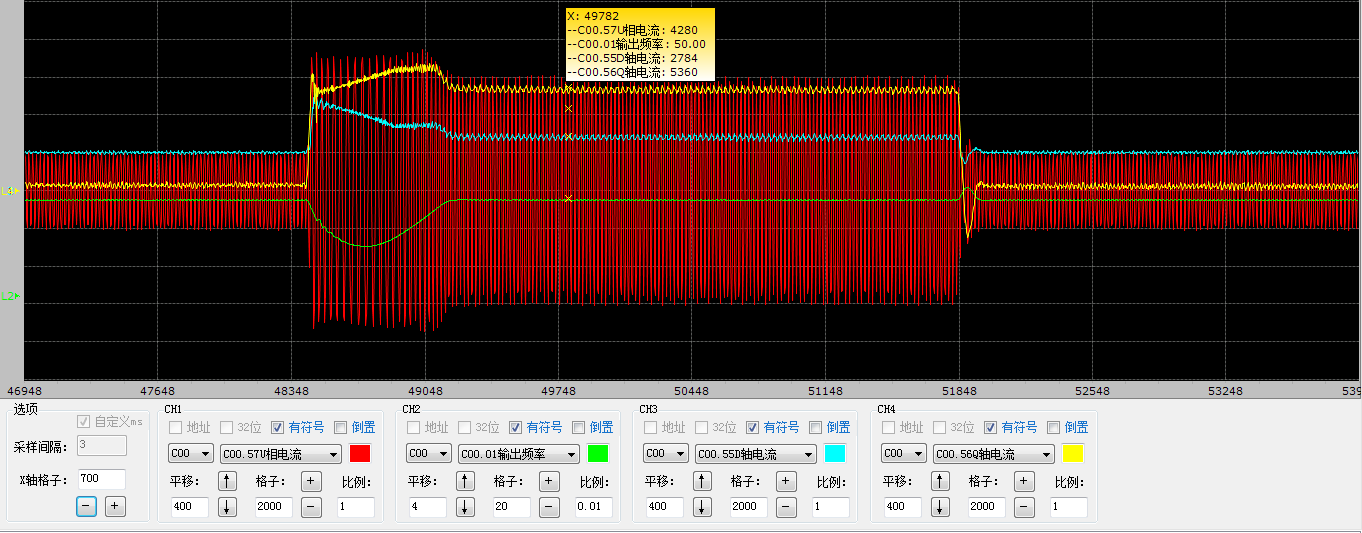
Temps d'accélération et de décélération 0,1 s, pleine charge de 0 à la fréquence nominale, accélération rapide et décélération rapide
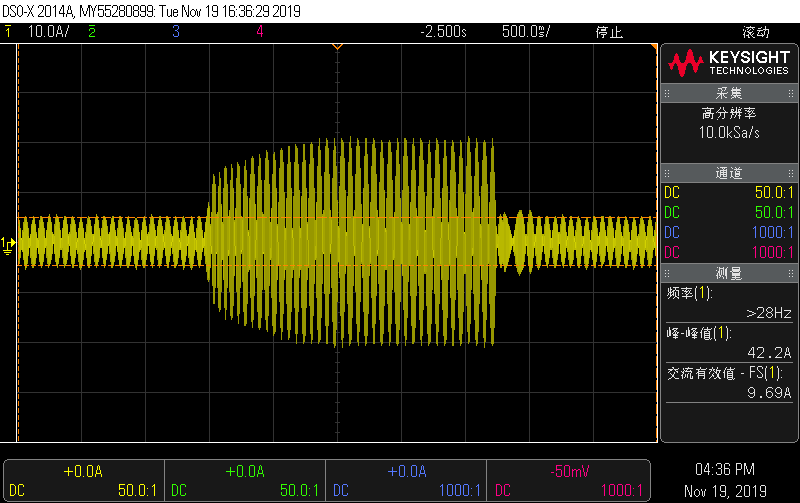
Soudain ajouté et soudainement déchargé à 180 % de la charge nominale
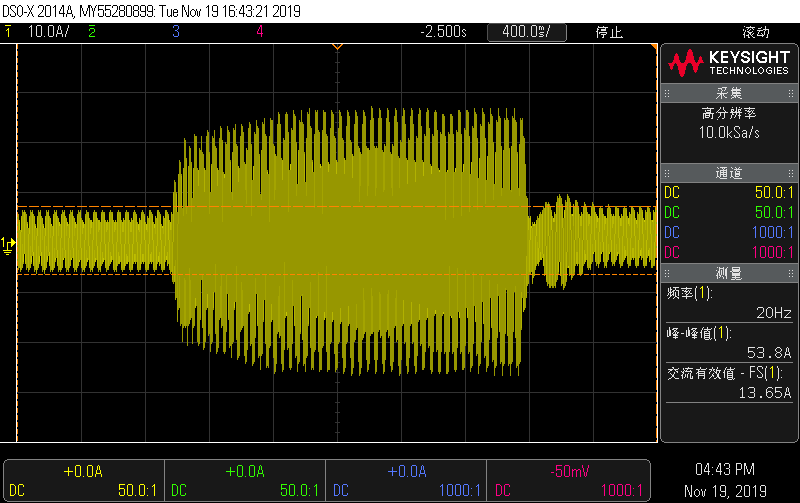
1,3 fois la vitesse nominale augmentation soudaine, décharge soudaine à pleine charge
Tension d'entrée réduite de 20 %, test de limite de charge nominale de la vitesse nominale
Résumé
La technologie de contrôle vectoriel en boucle ouverte du moteur à réluctance synchrone de l'onduleur AC310 peut entraîner le moteur à réluctance synchrone de manière stable et fiable, et a obtenu un excellent effet de contrôle. Il s'agit de la première production nationale généralisée de la technologie de commande de moteur à réluctance synchrone. Issu de la poursuite sans fin de la conduite, VEICHI continuera à fournir aux clients les dernières et meilleures solutions d'entraînement électrique.
 Laisser un message
Laisser un message