 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng ViệtQu'est-ce que l'algorithme de contrôle PID
Dans les applications pratiques de l'ingénierie, l'algorithme de contrôle PID est l'algorithme le plus largement utilisé. Le passage suivant est l'introduction spécifique de ce qu'est l'algorithme de contrôle PID.
Quel est le principe de fonctionnement de l'algorithme de contrôle PID ?
La loi de contrôle de régulateur la plus largement utilisée pour le contrôle proportionnel, intégral et différentiel est appelée algorithme de contrôle PID, également connu sous le nom de contrôle PID ou régulation PID. Les contrôleurs PID ont une histoire de près de 70 ans. La structure simple, la bonne stabilité et les performances fiables sont devenues l'une des principales technologies de contrôle industriel. Lorsque la structure et les paramètres de l'objet contrôlé ne sont pas entièrement donnés, la structure et les paramètres du contrôleur de système doivent être basés sur l'expérience et la mise en service sur site, et l'application de la technologie de contrôle PID est la technologie la plus pratique. Pour l'algorithme de contrôle PID, il existe un contrôle PI et un contrôle PD. Le contrôleur PID fonctionne en calculant les valeurs de contrôle proportionnelles, intégrales et différentielles.
Il existe actuellement 3 types d'algorithmes de contrôle PID relativement simples, à savoir : l'algorithme incrémental, l'algorithme de type position, l'algorithme différentiel. Ces algorithmes de contrôle sont les algorithmes les plus simples et les plus basiques car ils ont leurs propres caractéristiques et répondent aux exigences générales de la plupart des contrôles.
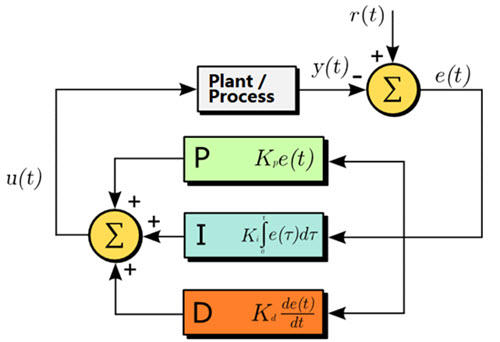
La formule complète est la suivante :
u (t) = Kp * e (t) + KiSe (t) + Kd [e (t) - e (t-1)] + u0
Dans le processus de débogage de l'algorithme de contrôle PID, nous devons noter les étapes suivantes :
1. Fermez I et D, ce qui signifie les mettre à 0 et augmenter P pour produire des oscillations ;
2. Réduire P pour trouver le point d'oscillation critique ;
3. Augmentez I pour atteindre la valeur cible ;
4. Remettez sous tension pour voir si le dépassement, l'oscillation et le temps de stabilisation sont conformes aux exigences ;
5. Ajoutez de manière appropriée des termes différentiels pour les conditions de dépassement et d'oscillation ;
Méthodes de réglage des paramètres du contrôleur PID
Le réglage des paramètres du contrôleur PID est au cœur de la conception du système de contrôle de moteur vectoriel. Et il existe de nombreuses méthodes de réglage des paramètres du contrôleur PID, et deux catégories peuvent être résumées :
1. Réglage du calcul théorique. Il détermine les paramètres du contrôleur sur la base d'un modèle mathématique et de calculs théoriques. Les données calculées par cette méthode ne peuvent pas être directement exploitées et doivent être ajustées et modifiées.
2.La méthode de réglage technique, qui s'appuie principalement sur l'expérience en ingénierie pour effectuer directement le test du système de contrôle et la méthode est facile à comprendre et est largement utilisée dans la pratique de l'ingénierie. Pour les méthodes de réglage des paramètres du contrôleur PID, il existe une méthode de rapport critique, une méthode de courbe de réponse et une méthode de décroissance.
Les méthodes ont leurs propres caractéristiques qu'elles sont toutes testées en premier, puis il y aurait une formule empirique d'ingénierie pour mettre en œuvre le réglage des paramètres du contrôleur. De nos jours, le système de contrôle PID est largement utilisé dans l'automatisation des automates programmables et les variateurs de fréquence, tandis que la méthode la plus couramment utilisée est la méthode du rapport critique.
Si vous avez besoin d'en savoir plus sur ce qu'est le système de contrôle PID et son principe de fonctionnement, n'hésitez pas à nous contacter et notre support technique vous répondra bientôt.
 Laisser un message
Laisser un message