 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng ViệtL'histoire du développement de l'onduleur
En tant que "vieille connaissance" dans le domaine du contrôle industriel, les variateurs de fréquence sont actifs dans diverses industries depuis des décennies. Il porte la responsabilité de la régulation de la vitesse du moteur et joue un rôle indispensable dans l'amélioration des processus de production et la conservation de l'énergie. D'un point de vue professionnel, il s'agit en fait d'une sorte d'équipement de contrôle de puissance qui utilise la technologie à fréquence variable et la technologie microélectronique pour contrôler la vitesse du moteur à courant alternatif en modifiant la fréquence d'alimentation du moteur à courant alternatif.
Alors, quelle est l'importance de l'onduleur pour la régulation de la vitesse du moteur ? Pourquoi le contrôle de la vitesse du moteur AC est-il "rien d'autre qu'il" ? En ce qui concerne l'importance du variateur de fréquence, nous comprendrons son processus de naissance et de développement à partir des aspects suivants.

Processus de naissance et de développement
Le contexte de l'époque avant la naissance de l'onduleur
Dans la production industrielle, l'utilisation de moteurs pour contrôler avec précision la vitesse et la position d'objets ou de composants est un processus nécessaire. Par exemple : équipement de levage, équipement de métier à tisser, bandes transporteuses de matériaux, rembobinage et déroulement, etc., et d'autres types de machines et d'équipements.
Lorsque la technologie de contrôle de la vitesse du moteur est encore immature, les utilisateurs ne peuvent utiliser que certaines aides mécaniques pour résoudre le problème du contrôle du mouvement des objets, tels que les boîtes de vitesses, les embrayages, etc., qui ne sont pas réglables mécaniquement. Dans le cas d'un moteur, pour atteindre un certain objectif sportif, il est nécessaire de remplacer la boîte de vitesses, de changer le rapport de vitesse ou de commuter l'embrayage. Ce processus prend non seulement beaucoup de temps, mais représente également une grande perte pour la machine.
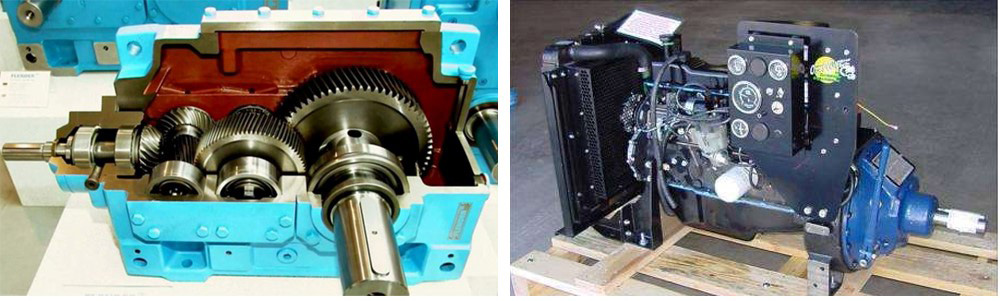
L'utilisation de moteurs pour contrôler avec précision la vitesse et la position d'objets ou de composants est un processus nécessaire
Dans un autre type de scénario d'application de contrôle des fluides, le moteur entraîne la rotation de la turbine, propulsant ainsi un flux de gaz ou de liquide ou générant une pression gazeuse et hydraulique correspondante. Au début, la vitesse du moteur ne peut pas être contrôlée librement, le contrôle du débit et de la pression du fluide ne peut être obtenu qu'en ouvrant et en fermant la vanne dans la canalisation, ce qui est un gaspillage d'énergie électrique.
À l'ère où il n'y a pas de variateur de fréquence, parce que la vitesse du moteur ne peut pas être ajustée librement, afin d'atteindre certains objectifs de mouvement, la machine traditionnelle doit ajouter de nombreux accessoires, ce qui non seulement augmente la complexité et le coût du système global, mais limite également les performances et l'espace de développement de l'appareil, afin de résoudre ces problèmes, l'introduction d'une technologie de contrôle de la vitesse du moteur simple et efficace a été un point chaud et un point sensible de la recherche sur la transmission industrielle.
A l'ère où il n'y a pas de variateur de fréquence
Dilemme dans la régulation de la vitesse du moteur
La régulation de la vitesse du moteur a toujours été axée sur le moteur à courant continu. L'une des principales raisons est que les gens saisissent d'abord la technologie de rectification, et les caractéristiques mécaniques du moteur à courant continu sont également très adaptées à certaines scènes. La façon la plus simple d'ajuster la tension d'induit est d'utiliser des résistances de chaîne. Plus la résistance est élevée, plus la chute de tension est importante et plus la vitesse du moteur à courant continu sera lente.

Plus la résistance est élevée, plus la chute de tension est importante
Cependant, les défauts du moteur à courant continu sont également très évidents. Par exemple, l'anneau collecteur et le balai de charbon nécessitent un entretien régulier, le processus de fabrication du moteur à courant continu est compliqué et le coût de fabrication est élevé. Cela signifie que les moteurs à courant continu ne conviennent pas à une large gamme d'applications de moteur.
Les moteurs à courant continu ne conviennent pas à une large gamme d'applications de moteur
Par rapport aux moteurs à courant continu, les moteurs à courant alternatif ont une structure interne beaucoup plus simple, sans commutateur ni autres structures. Ils sont faciles à fabriquer et stables, adaptés aux applications à haute vitesse, haute tension et courant élevé. La seule chose qui doit être résolue est le problème de contrôle de la vitesse du moteur AC.
Évolution du variateur de fréquence
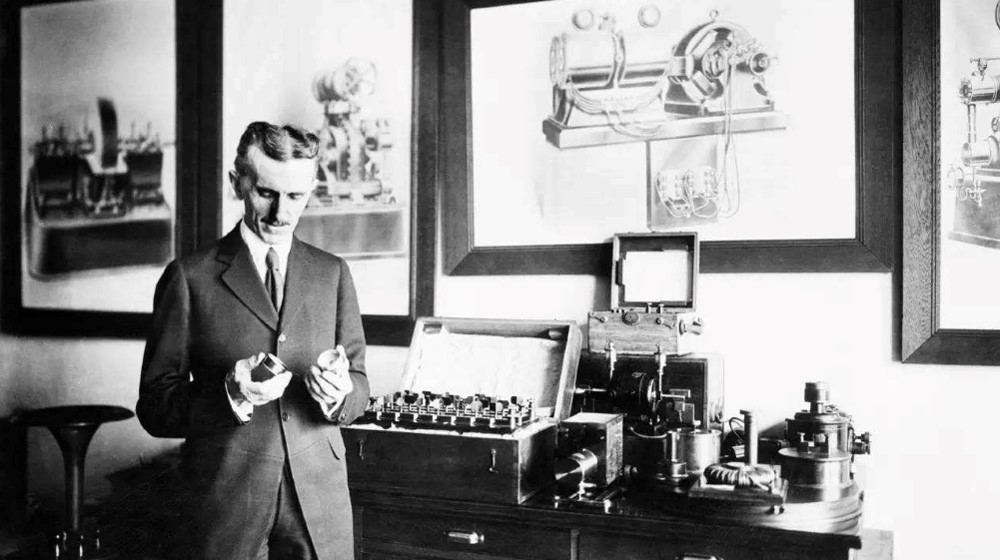
Nikola Tesla invente un moteur à courant alternatif
En 1888, les moteurs à courant alternatif et à courant alternatif ont été introduits, mais après une longue période, les moteurs à courant alternatif ne pouvaient fonctionner qu'à une ou plusieurs vitesses fixes en raison de leurs raisons structurelles. Sa vitesse est proportionnelle à la fréquence et inversement proportionnelle au nombre de paires de pôles.
n = 60 f( 1 - s )/ p
Il ressort de la formule ci-dessus que le taux de glissement “s” et la paire de pôles “p” sont les paramètres caractéristiques inhérents au moteur. Il ne peut pas être changé après la fabrication du moteur. Si vous souhaitez régler librement la vitesse, modifiez uniquement la fréquence d'entrée de son alimentation "f". Il n'y a pratiquement aucun moyen d'ajuster librement la fréquence de la tension du réseau avant la naissance de l'onduleur.
Le taux de glissement “s” et la paire de pôles “p” sont les paramètres caractéristiques inhérents au moteur
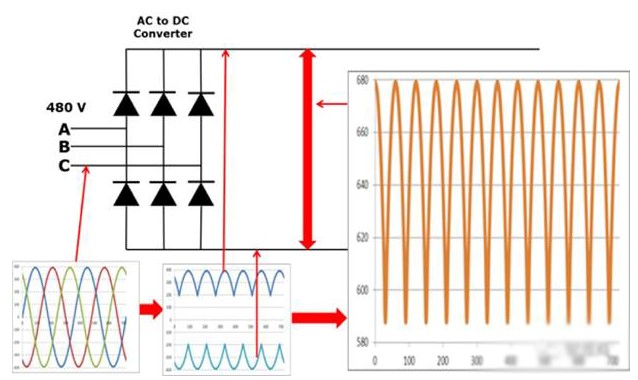
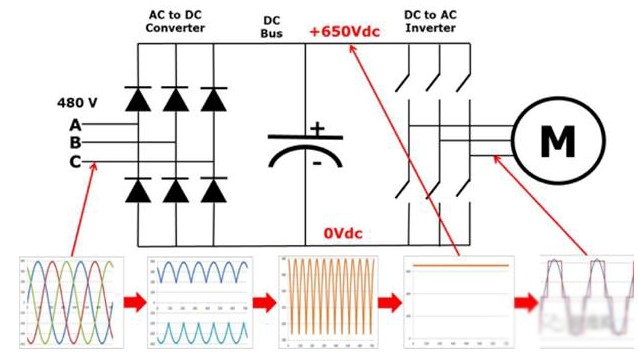
Dans les années 1980, avec le développement de la technologie des semi-conducteurs, en particulier des microprocesseurs et des thyristors, les microprocesseurs ont été utilisés pour contrôler l'état de conduction des thyristors. De cette façon, le microprocesseur peut être utilisé pour contrôler la fermeture de la conduction des éléments de commutation de pont supérieur et inférieur, et le fonctionnement continu peut être effectué selon une synchronisation spécifique, de sorte que le courant continu peut être converti en courant alternatif, qui est ce que nous appelons souvent la technologie des onduleurs ; En même temps, nous pouvons ajuster le cycle de fonctionnement du composant de puissance pour ouvrir et fermer, ce qui signifie que le réglage de la fréquence de sortie de l'onduleur peut être réalisé.
Enfin, combiné à la technologie de redressement, nous pouvons convertir rapidement la fréquence standard du réseau en fréquence correspondante et le courant alternatif de la tension correspondante en fonction de l'amplitude et de la fréquence de l'alimentation électrique requise, modifiant ainsi la fréquence d'entrée du moteur pour réaliser le contrôle de réglage de la vitesse du moteur à courant alternatif. Après une longue période de développement technologique et d'efforts inlassables des scientifiques, le variateur de fréquence a été mis à niveau et a évolué en une seule application, et il est progressivement devenu ce que nous voyons aujourd'hui.

Produits VEICHI
Comprenons le développement de l'onduleur depuis le début, puis introduisons le développement de la technologie de conversion de fréquence. Il résume peut essentiellement être divisé en trois étapes suivantes.
1. Remplacement de l'électronique de puissance
Avec le développement continu des dispositifs à semi-conducteurs, nous utilisons un dispositif entièrement contrôlé au lieu d'un thyristor semi-contrôlé (SCR) pour changer la forme d'onde de sortie en une forme d'onde PWM modulée en largeur d'impulsion, ce qui réduit considérablement les composants harmoniques, le la plage de vitesse du moteur asynchrone est augmentée et la fluctuation de couple est réduite.
La fréquence de fonctionnement de l'IGBT peut généralement atteindre entre 10 et 20 kHz. Par rapport au BJT de la triode BJT, la fréquence de fonctionnement est d'un ordre de grandeur plus élevé, en particulier en termes de certains indicateurs de tension et de courant, qui ont dépassé l'utilisation du BJT, tels que la tolérance aux surtensions, le pic de blocage de tension, etc. En raison de l'utilisation des IGBT, la fréquence porteuse peut être augmentée et même la forme d'onde PWM requise peut être formée, ce qui peut réduire considérablement le bruit harmonique. Par conséquent, dans les applications d'onduleurs actuelles, l'IGBT a essentiellement remplacé le BJT.
IPM est le module d'alimentation intelligent ; il utilise IGBT comme dispositif de commutation, qui intègre non seulement le dispositif de commutation de puissance et le circuit de commande. Il intègre également des circuits de détection de défauts tels que les surtensions, les surintensités et les surchauffes, et peut envoyer des signaux de détection au CPU. Même en cas d'accident de charge ou d'utilisation inappropriée, l'IPM lui-même peut être garanti sans dommage.
Module IGBT
2. Développement de méthodes de contrôle
La méthode de contrôle de l'onduleur précédente adoptait le rapport de tension constant qui est le contrôle V/f. V est la valeur efficace de la tension. La modification de V/f ne peut ajuster que le flux et le couple en régime permanent du moteur. Afin d'améliorer le couple dans des conditions de basse fréquence, une augmentation de couple est nécessaire. Habituellement, la tension est compensée, et certains peuvent compenser la chute de tension de l'enroulement du stator avec des changements de charge.
Plus tard, l'onduleur est apparu une nouvelle méthode de contrôle - contrôle vectoriel. Son principe de base est d'établir un modèle du moteur à courant continu équivalent, et le courant statorique de la machine asynchrone est décomposé séparément en composante d'excitation et en composante de couple. Le contrôle du vecteur d'excitation est le plus important, c'est pourquoi le contrôle vectoriel est appelé contrôle orienté champ et le contrôle du couple est indirect.
Schéma de la structure du système de contrôle vectoriel Le contrôle vectoriel nécessite des opérations de transformation de coordonnées et la nécessité de détecter le signal de vitesse réel, de sorte que le capteur de vitesse est requis pour la rétroaction qui est un contrôle vectoriel en boucle fermée. Ensuite, un schéma vectoriel de contrôle vectoriel sans capteur de vitesse est proposé, qui est calculé sur la base de la tension de phase et du courant de phase du fonctionnement réel du moteur et des paramètres des enroulements du stator et du rotor, puis des valeurs d'observation du flux du rotor. et le courant de couple sont calculés, réalisant ainsi le contrôle vectoriel du champ orienté.
Une autre façon de développer en parallèle avec le contrôle vectoriel s'appelle le contrôle direct du couple (DTC), qui met l'accent sur le contrôle direct du couple. La méthode est basée sur la tension et le courant mesurés du moteur pour calculer la valeur estimée du flux et du couple du moteur, et après avoir contrôlé le couple, la vitesse du moteur peut également être contrôlée.
3. Diversification fonctionnelle
Le variateur de fréquence actuel repose sur un microprocesseur très puissant, en plus des tâches de base de la régulation de la vitesse de conversion de fréquence du moteur, il existe également une variété de fonctions intégrées. Par exemple :
(1) Accélération et décélération automatiques.
(2) Le programme s'exécute.
(3) Opération d'économie d'énergie automatique.
(4) Auto-apprentissage des paramètres du moteur.
(5) Fonctionnement du contrôle PID.
(6) Fonctions de communication et de rétroaction.
Dans les années 1970, les ingénieurs de Siemens ont proposé pour la première fois la théorie du contrôle vectoriel des moteurs asynchrones pour résoudre le problème du contrôle du couple des moteurs à courant alternatif. Pour le contrôle direct du couple, la littérature générale pense qu'il a été enseigné par le professeur M. Depenbrock de l'Université de la Ruhr et I.Takahashi du Japon a été proposé séparément en 1985. On peut voir que les résultats de la recherche sur le contrôle moteur dans les pays étrangers sont antérieurs à ceux en Chine, et leurs produits onduleurs entrent également dans le champ de vision du public avant nos marques nationales.

VEICHI
Maintenant, grâce à l'apprentissage continu et à la recherche de nombreux ingénieurs dans ce domaine en Chine, l'industrie nationale des onduleurs, en termes de marque, de performances et de prix, a largement satisfait l'état de développement de l'industrie chinoise. En tant qu'entreprise spécialisée dans la R&D, la production et le service d'onduleurs de fréquence, VEICHI s'est concentrée sur la recherche dans ce domaine et fabrique soigneusement chaque produit d'inversion de fréquence pour contribuer à l'avenir de la fabrication intelligente 2025.
 Laisser un message
Laisser un message