 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng Việt





Contrôleur de mouvement V5-MC104
- Prend en charge plusieurs langages de programmation
- Prend en charge une variété de modes de communication
- Prend en charge le mouvement synchrone sur 16 axes ; le cycle de contrôle est inférieur à 1 ms
- Adopter une interface d'acquisition d'impulsions à grande vitesse en boucle fermée multi-axes
Contrôleur de mouvement V5 Présentation
Le contrôleur logique programmable de mouvement de la série V5-MC104 est un contrôleur de mouvement multi-axes développé sur la base d'un processeur hautes performances conçu pour divers environnements d'automatisation industrielle.
1. Prend en charge le mouvement synchrone sur 16 axes, cycle de contrôle 125 s-1 ms.
2. La gestion et les fonctions puissantes des E/S répondent aux exigences de contrôle logique du système de contrôle.
3. Pensée modulaire, emballage pratique des modules de fonctions.
4. Bonne héritabilité, raccourcit le cycle de développement du projet.
5. Les utilisateurs peuvent choisir la méthode de programmation en fonction de leurs propres habitudes.
6. Intégrez plusieurs blocs fonctionnels, appelez simplement pour postuler.
7. Prend en charge plusieurs méthodes de communication.
8. Une variété de méthodes de programmation, faciles à utiliser.
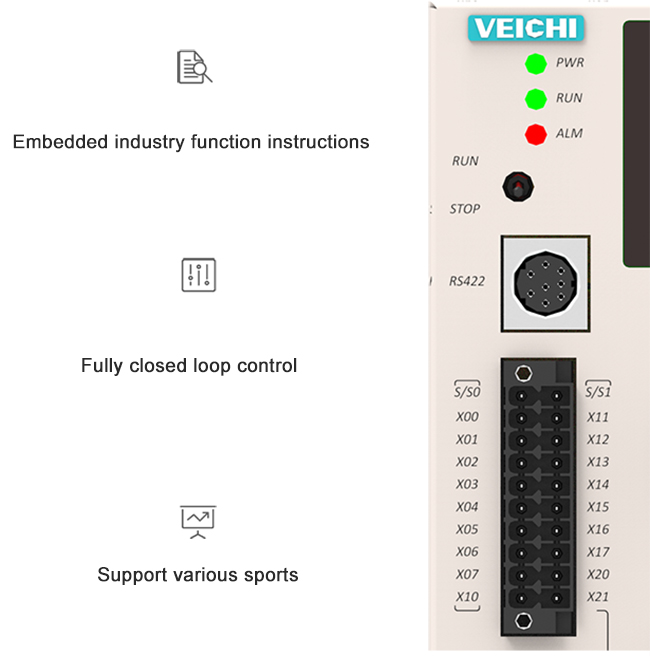
Large gamme d'applications
1. Prend en charge le mouvement de jogging, l'interpolation linéaire, l'arc, l'arc 3D, l'engrenage/came électronique, etc.
2. Un grand nombre d'instructions de fonctions industrielles pratiques intégrées, telles que l'enroulement, le cisaillement de suivi, le cisaillement volant, l'emballage et d'autres modules industriels, rendent l'application très simple.
3. Les blocs fonctionnels tels que le suivi synchrone intégré, le contrôle en boucle fermée complète et le contrôle de mouvement coopératif multi-axes peuvent être appliqués simplement par appel.
Puce principale double cœur, meilleures performances
1. La puce principale dispose d'un traitement double cœur et d'opérations logiques puissantes.
2. La fréquence de sortie peut aller jusqu'à 3M.
3. La période minimale de contrôle peut atteindre 125 s.
Prise en charge du débogage en ligne, fonctionnement plus pratique
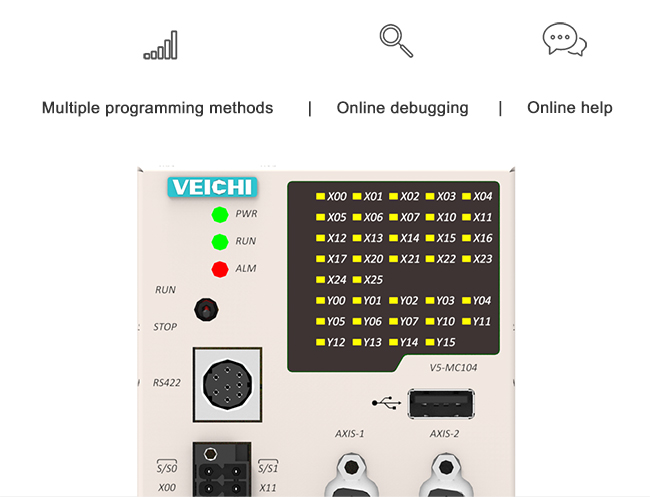
1. Il prend en charge quatre méthodes de programmation, notamment le schéma à contacts, la liste d'instructions, l'instruction MC et le code G.
2. Prend en charge le débogage en ligne et le débogage de simulation en ligne.
3. Les utilisateurs peuvent trouver rapidement de l'aide grâce à la fonction d'aide en ligne détaillée.
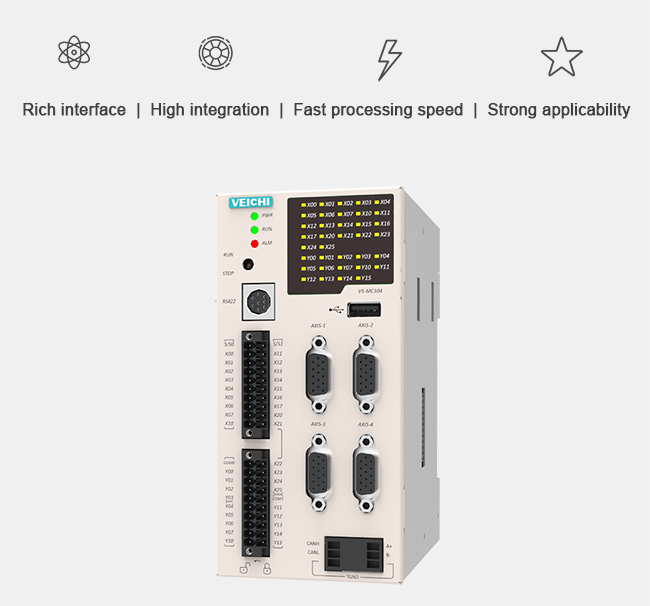
Prise en charge de plusieurs interfaces, extension plus complète

1. Prend en charge plusieurs méthodes de communication telles que RS422, RS485, RS232, CAN, EtherNet, etc.
2. Prise en charge de l'interface USB HOST, de la copie de fichiers et de la mise à niveau du système.
3. AD 4 canaux, DA 2 canaux.
4. Interface d'entrée et de sortie extensible.
Une sécurité accrue, un système plus fiable
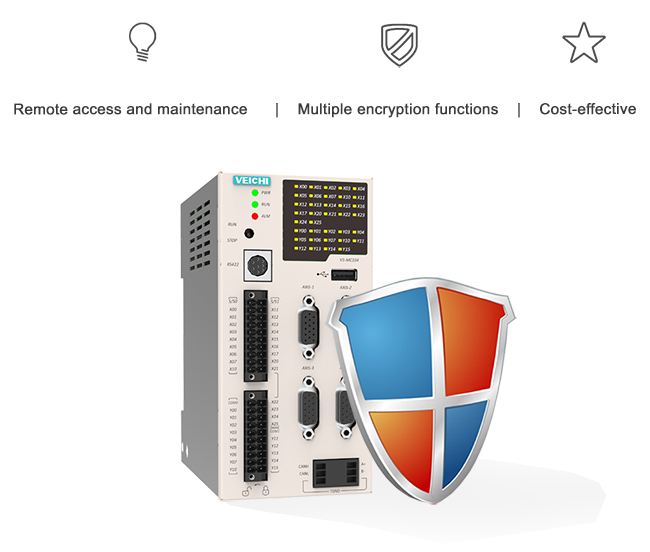
1. Prend en charge le cryptage du programme utilisateur, le cryptage multiple.
2. Prend en charge le cryptage du programme utilisateur, plusieurs cryptages.
3. Avoir une résistance sismique et des capacités d'interférence plus élevées.
La conception structurelle est plus conforme aux exigences d'installation des sites industriels
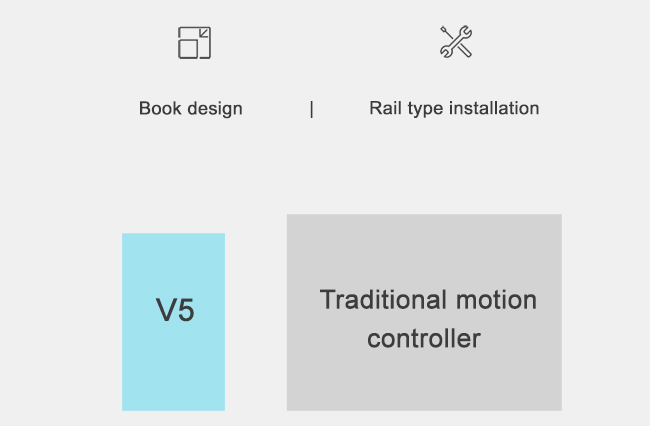
Dans la structure, la méthode traditionnelle de conception du contrôleur de mouvement est abandonnée et la conception du livre est adoptée, qui est plus compacte et plus belle. L'installation sur rail DIN permet également d'économiser beaucoup d'espace.
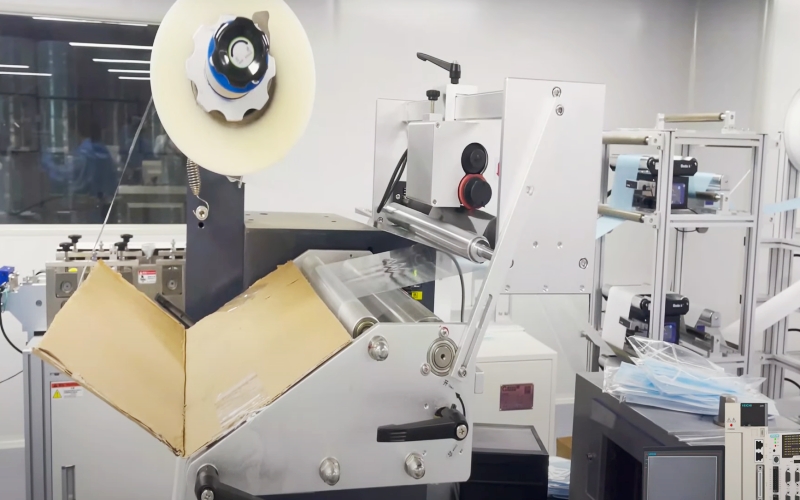
Vidéo du contrôleur de mouvement V5-MC104
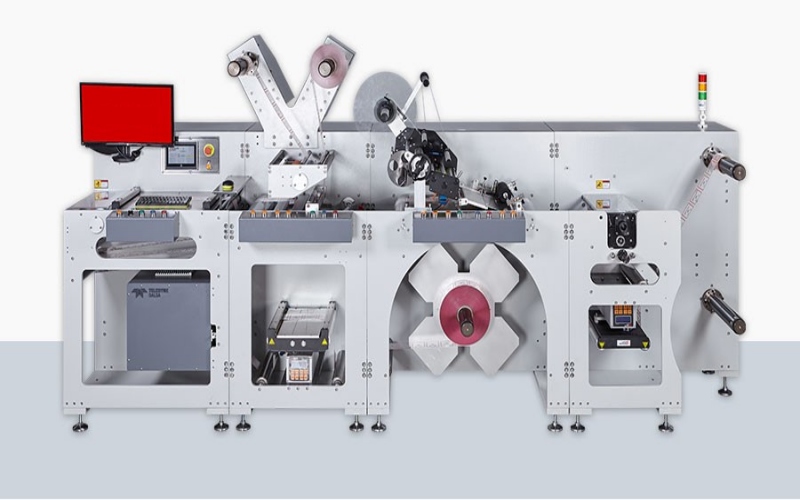
Applications industrielles pour le contrôleur de mouvement V5
Applications : machines à bois, machines textiles, robots industriels, cisailles à chasser, cisailles volantes et autres occasions.
Caractéristiques
| Plateforme logicielle | Schéma en échelle de prise en charge, tableau d'instructions, diagramme de fonctions de séquence, code G Prise en charge du réseau à distance accès et maintenance Fonction de multi-cryptage pour garantir les droits de propriété intellectuelle de l'utilisateur Prise en charge des variables réseau pour le contrôle de coordination multi-robots |
|---|
| Mode d'exécution du programme | Adopter le mode d'analyse qui peut être défini sur une analyse à cycle fixe, un déclencheur d'événement interne et un déclencheur d'événement externe< /span> |
|---|---|
| Fonction de débogage | Prise en charge du débogage en ligne et du débogage de simulation en ligne |
| Fonction d'aide en ligne | Les utilisateurs peuvent trouver rapidement de l'aide grâce à la fonction d'aide en ligne détaillée |
| Développement de modules fonctionnels | Les utilisateurs peuvent facilement effectuer diverses encapsulations modulaires pour le déplacement et la réutilisation du programme |
| Fonction de cryptage logiciel | Cryptage du programme principal, cryptage des sous-programmes, cryptage des fonctions de téléchargement et de téléchargement, cryptage du module de fonction d'auto-encapsulation de l'utilisateur |
| Fonction de diagnostic à distance | Les utilisateurs peuvent se connecter à distance à la machine cible via Ethernet et effectuer des modifications, le débogage et le fonctionnement en ligne de programmes pour réaliser le diagnostic et la maintenance de la machine |
| Fonction de simulation | Les utilisateurs peuvent exécuter et déboguer des simulations |
| Mode de contrôle | Contrôle de mouvement, contrôle logique |
| Fonction de traitement d'image | Connecté au CCD pour garantir la précision du traitement grâce au positionnement visuel |
| Fonction de compensation | Posséder une fonction de compensation de jeu |
| Vitesse d'horloge du processeur | 168 Mo |
|---|---|
| Mémoire | 64 Mo |
| Interface d'affichage | RS422, port réseau |
| USB | 1 × USB2.0 |
| Port COM | 1×RS-232, 2×RS-48, 1×RS-422 |
| Ethernet | 1×10M/100M adaptatif |
| Signal d'impulsion | Impulsion différentielle, 4 MHz |
| Signal codeur | 4 MHz |
| Interface AD | 12 bits × 2 |
| E/S numériques | 22 entrées, 14 sorties |
| Cycle | Cycle de contrôle : 1 ms |
| Bus de terrain | EtherCAT/CAN/MODBUS |
| Fonctions étendues | Modules d'E/S extensibles, modules d'axe |
| Conditions d'alimentation | +24 V±10 %, Icc=3A |
| Fonction de contrôle de mouvement | Mouvement du point JOG Engrenage électronique Came électronique< br />Interpolation linéaire 2, 3 Interpolation circulaire à trois plans Sortie de comparaison de position Compensation du jeu |
| Température de fonctionnement | 0~55 ℃ |
| Humidité de fonctionnement | 5 % ~ 90 % sans condensation |
| Dimension du contrôleur | 155 mm×76 mm×110 mm |
| Module d'E/S distantes | V5-MC104 dispose d'une puissante fonction de contrôle de mouvement qui peut offrir une large gamme d'entrées et de sorties numériques modules, modules d'entrée et de sortie analogiques, module d'entrée thermocouple, module de sortie relais et autres modules IO. Il peut être étendu jusqu'à 200 points d'E/S pour répondre à toutes sortes d'applications industrielles de contrôle logique et à une variété d'exigences fonctionnelles d'entrée et de sortie de signaux. |











 Laisser un message
Laisser un message