 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng ViệtSolution du SD700 sur un robot de soudage à six axes
Présentation de l'industrie
Le robot de soudage à six axes sert à fixer des pinces à souder ou des pistolets à souder (couper) à la bride finale de l'arbre du robot industriel. Un mécanisme qui permet le soudage, le découpage ou la projection thermique. Il peut être utilisé avec six servomoteurs à contrôler, et l'action est très flexible. Il peut être soudé en trois dimensions et de manière irrégulière dans n'importe quelle direction. Il s'agit d'une machine d'exploitation à commande automatique polyvalente et reprogrammable. Avec trois axes programmables ou plus, il présente les caractéristiques d'une structure compacte, d'un mouvement flexible et d'un travail stable. Il est largement utilisé dans le domaine de la production de soudage automatisé.

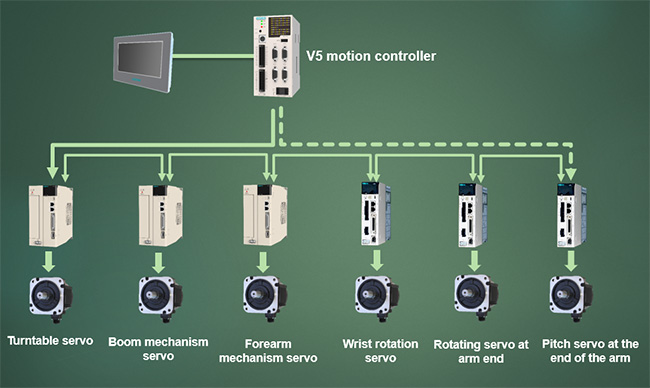
Topologie du système
Points forts du programme
1. L'interface homme-machine est contrôlée de manière centralisée pour réaliser le réglage des paramètres de recette, la surveillance des données de production, le comptage des sorties et l'opération est plus intelligente et simple.
2. Le contrôleur de fonctionnement du bus EtherCAT intègre la solution maître EtherCAT. Il peut réaliser un mouvement coordonné multi-axes, un mouvement ponctuel à grande vitesse et un contrôle de réponse rapide en temps réel. Faites en sorte que les pièces mobiles terminent l'action de soudage conformément à la trajectoire de mouvement et aux paramètres de mouvement attendus.
3. Le servo-variateur de type bus VEICHI SD700 EtherCAT a une fréquence de réponse ultra-élevée. La plage de vitesse est large, les performances de synchronisation sont excellentes, la capacité anti-interférence est forte et la station maîtresse est parfaitement adaptée.
Principe du processus
Le robot de soudage à six axes est principalement composé d'un mécanisme de poignet, d'un mécanisme de bras et d'un mécanisme de rotation :
1. Mécanisme du poignet : comprenant l'articulation du pas à l'extrémité du poignet, l'articulation tournante à l'extrémité du poignet et l'articulation tournante autour de l'axe du poignet dans son ensemble. Le moteur à l'extrémité du poignet est situé à l'extrémité du bras, et la puissance des deux premières articulations d'action est transmise par les deux servomoteurs à l'aide d'un accouplement pour connecter le long mandrin, et un engrenage conique est utilisé pour changer le direction. Et utilisez la courroie de distribution pour transmettre la puissance jusqu'au bout du poignet. L'ensemble de l'articulation pivotante du poignet est entraîné par un servomoteur pour entraîner une roue à courroie synchrone afin de réaliser le mouvement global autour de l'axe.
2. Mécanisme du bras : Comprenant l'articulation tangente de l'avant-bras autour de l'axe horizontal et l'articulation tangente du gros bras autour de l'axe horizontal. L'articulation de pas d'avant-bras est transmise par le servomoteur aux petites roues de l'engrenage à travers la courroie de distribution, puis la puissance est finalement transmise à l'arbre de joint rotatif de l'avant-bras-flèche à travers l'engrenage droit cylindrique à développante. Le servomoteur commun, la roue de la courroie de distribution et le jeu d'engrenages sont tous disposés sur la flèche. Le servomoteur de l'articulation du grand bras est situé sur la base de la taille. Une fois que la puissance est sortie de l'arbre du moteur, elle est transmise à un ensemble d'engrenages droits via une roue de courroie de distribution. Ensuite, le grand engrenage de l'ensemble d'engrenages droits est transféré à l'axe du joint de pas de la flèche.
3. Mécanisme rotatif : le poids de la quasi-totalité de l'équipement, tel que le mécanisme du poignet et du bras, doit être chargé sur l'arbre rotatif. Par conséquent, la puissance du servomoteur du mécanisme d'orientation est directement transmise à l'arbre commun par un ensemble d'engrenages à vis sans fin grâce à l'ajout d'un réducteur.
Indice technique
Le rayon de travail maximal peut atteindre 1 400 mm.
La précision de positionnement répétée peut atteindre 0,05 mm.
Candidature









 Laisser un message
Laisser un message