 Global - English
Global - English Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Vietnamese - Tiếng Việt
Vietnamese - Tiếng Việt




API hautes performances série VC5
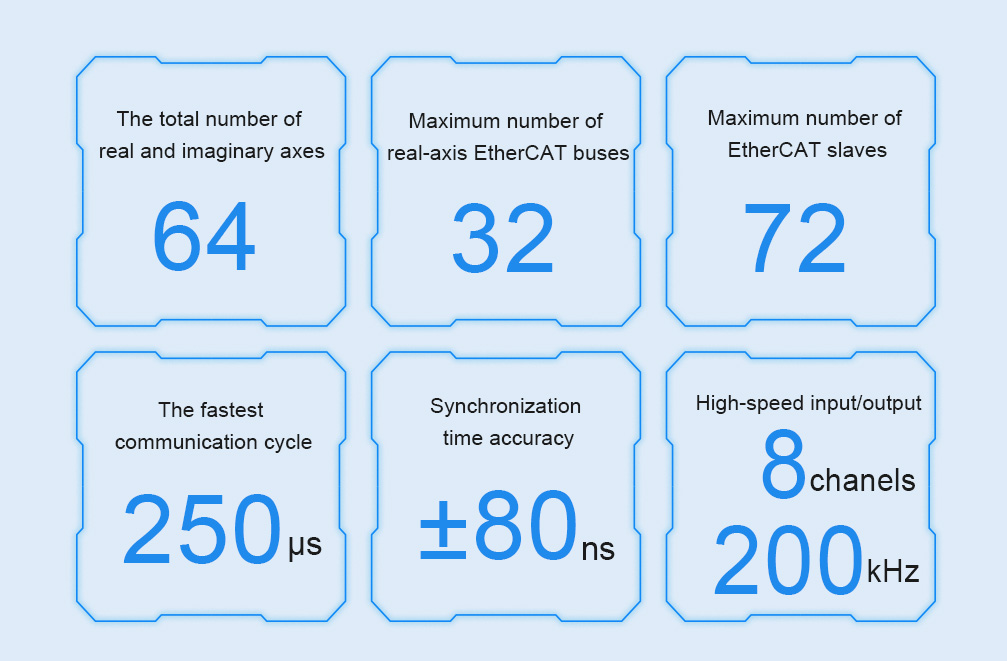
- Prend en charge 32 axes réels et 32 à 64 axes imaginaires avec un contrôle de mouvement puissant.
- L'espace du programme utilisateur prend en charge 200 000 étapes.
- 8 canaux de comptage d'entrée haute vitesse 200 kHz et 8 canaux de sortie haute vitesse 200 kHz.
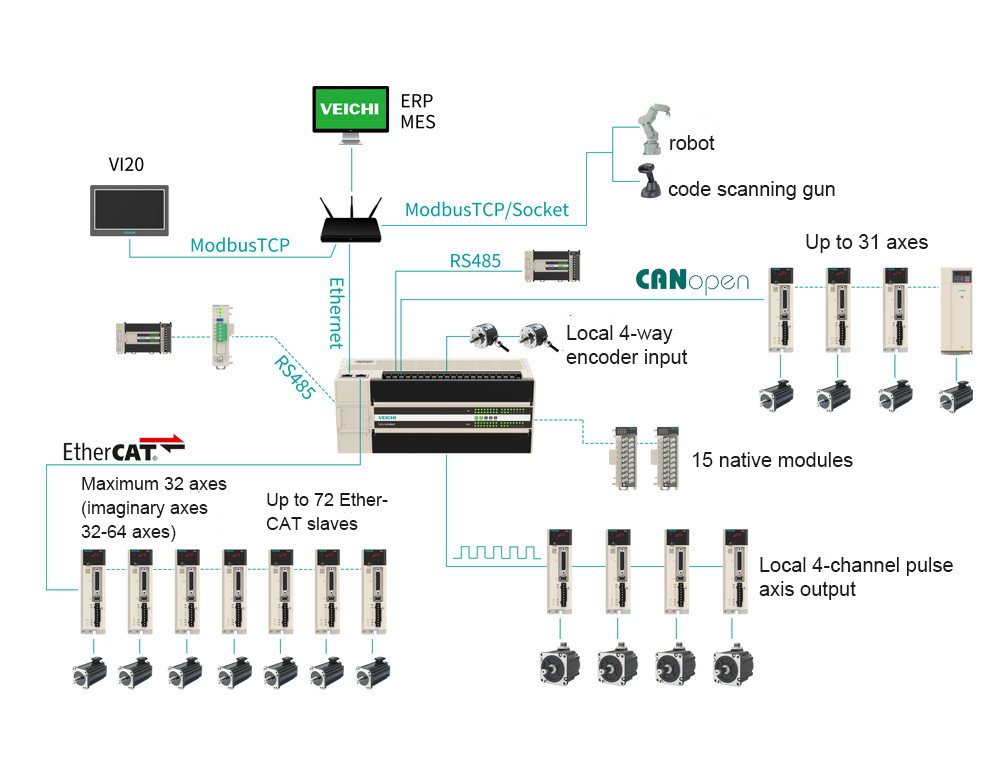
- RS485, CAN, Ethernet et EtherCAT, l'interface peut réaliser une communication réseau à plusieurs niveaux.
Présentation des API hautes performances avec bus EtherCAT série VC5
L'API série VC5 est une nouvelle génération d'API bus haute performance développée par VEICHI. Utilisant une technologie d'architecture double cœur, il dispose de puissantes capacités de contrôle de mouvement, le cycle de communication le plus rapide est de 250 µs et la précision du temps de synchronisation est de ± 80 ns. Un contrôle de mouvement par bus EtherCAT allant jusqu'à 32 axes réels peut être réalisé. Il peut répondre aux exigences de capacité de l'arbre de courroie et aux exigences strictes de contrôle des coûts, réduisant ainsi la pression sur la fabrication.

1. Prend en charge 32 axes réels et 32 à 64 axes imaginaires.
2. L'espace du programme utilisateur prend en charge 200 000 étapes.
3. 8 canaux de comptage d'entrée haute vitesse 200 kHz et 8 canaux de sortie haute vitesse 200 kHz.
4. RS485, CAN, Ethernet et EtherCAT, l'interface peut réaliser une communication réseau à plusieurs niveaux.
Prend en charge le contrôle de mouvement du bus EtherCAT à 32 axes

Prise en charge Ethernet industrielle avancée, fonctionnement distribué des stations maîtres et esclaves, installation pratique et cycle de transmission d'informations raccourci. La vitesse de communication est rapide, le temps de synchronisation est court et les modes de contrôle de fonctionnement tels que ligne droite, arc et came sont pris en charge.
Prise en charge du protocole CanOpen

Prend en charge le protocole CanOpen maître, esclave et CAN gratuit (protocole 301/402).
Réaliser une communication réseau multi-niveaux
VC5 prend en charge EtherCAT, Ethernet (Modbus-TCP, TCP/IP), CANopen, RS485 (Modbus, protocole gratuit), RS232, Type-C. Prend en charge le protocole N:N développé indépendamment par VEICHI. Une communication réseau à plusieurs niveaux peut être réalisée. Dans les cas où il y a interaction d'informations avec le servo, la vision, le robot, le pistolet à lecture de code, le MES, etc., cela apporte une amélioration globale de l'efficacité de la fabrication.
Prend en charge la fonction de came électronique et d'engrenage électronique
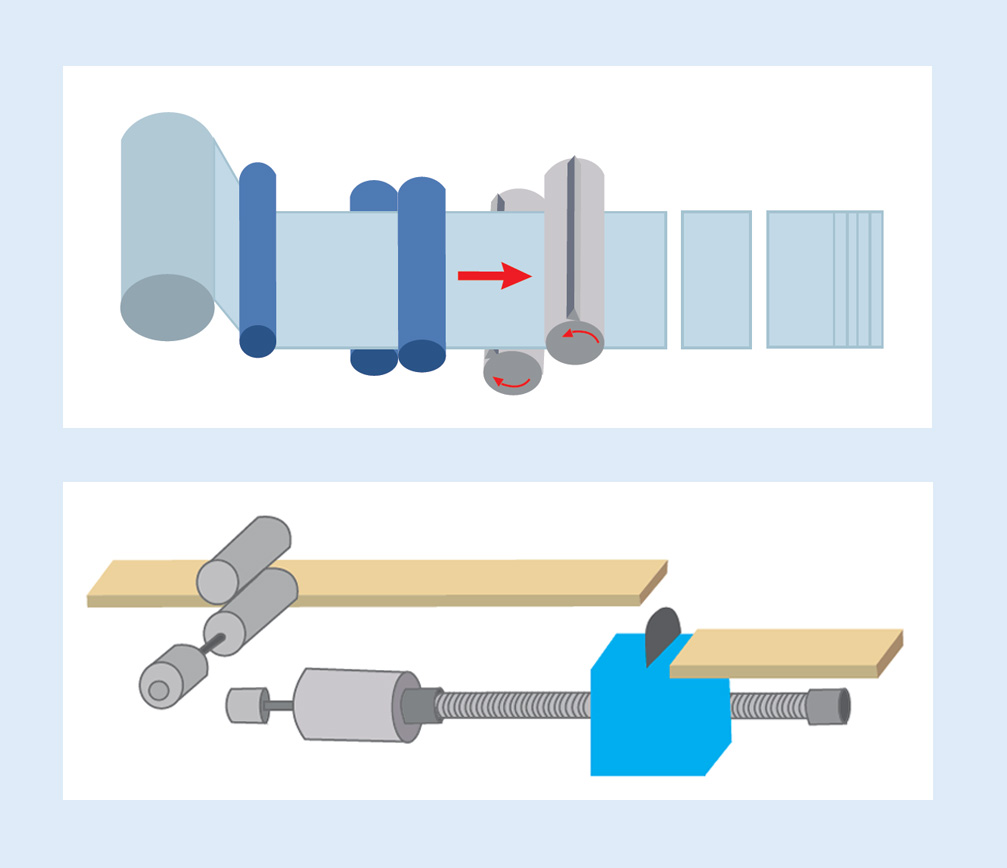
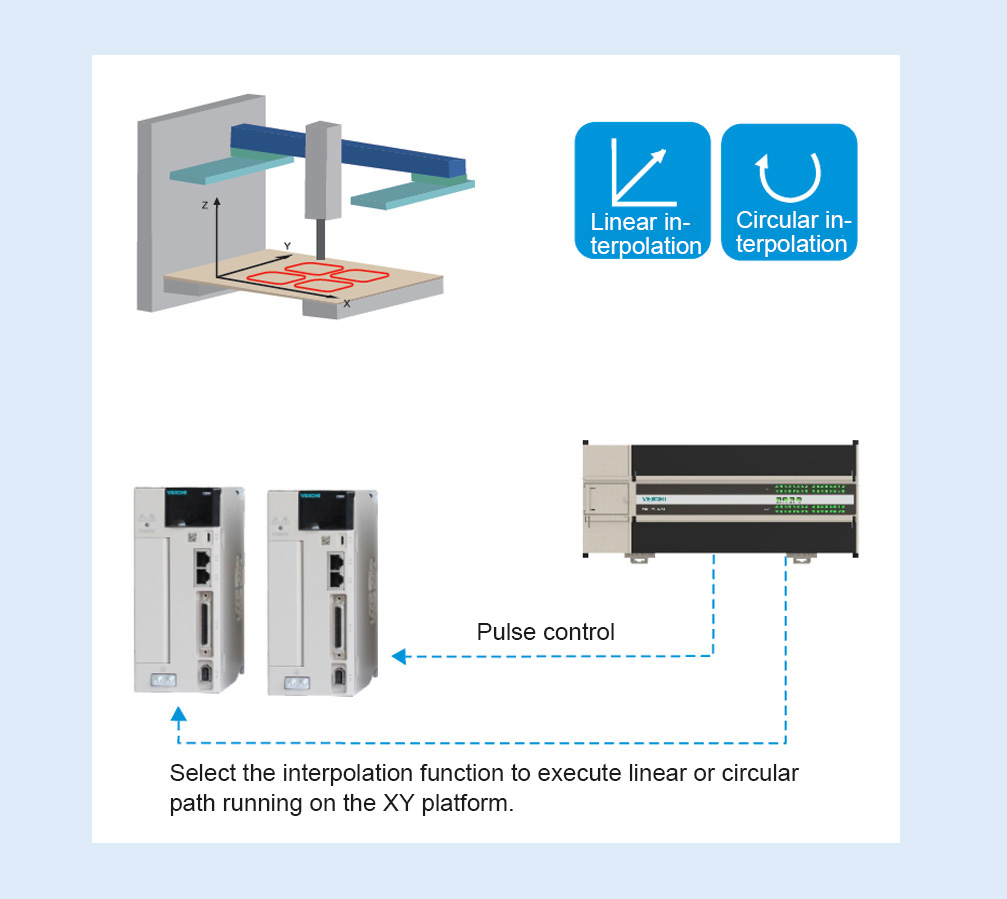
Interpolation linéaire, interpolation circulaire
8 entrées de comptage à grande vitesse, 8 sorties d'impulsions à grande vitesse
Prend en charge le comptage de phases AB monophasé, biphasé (haut/bas). Il prend en charge le comptage de 4 multiplicateurs, un compteur à grande vitesse prend en charge 8 canaux pour monophasé, la fréquence la plus élevée est de 200 kHz et le double phase prend en charge 4 canaux et la fréquence la plus élevée est de 200 kHz.
Fournit 8 sorties d'impulsions à grande vitesse avec une fréquence de sortie de 200 kHz. Prend en charge le groupe d'instructions de contrôle de positionnement, ce qui permet aux utilisateurs de mettre en œuvre des applications de contrôle de mouvement.
Interface COM
Le module CPU fournit 1 port de communication série RS232 et 1 port de communication série RS485, nommés respectivement COM0 et COM1, et le débit binaire de communication maximum est de 115,2k. Le port COM0 peut être utilisé comme port de programmation et prend également en charge le protocole esclave Modbus RTU. COM1 prend en charge le protocole maître/esclave Modbus RTU, la communication accessible, le protocole N:N, la résistance de terminal intégrée et peut être composé.
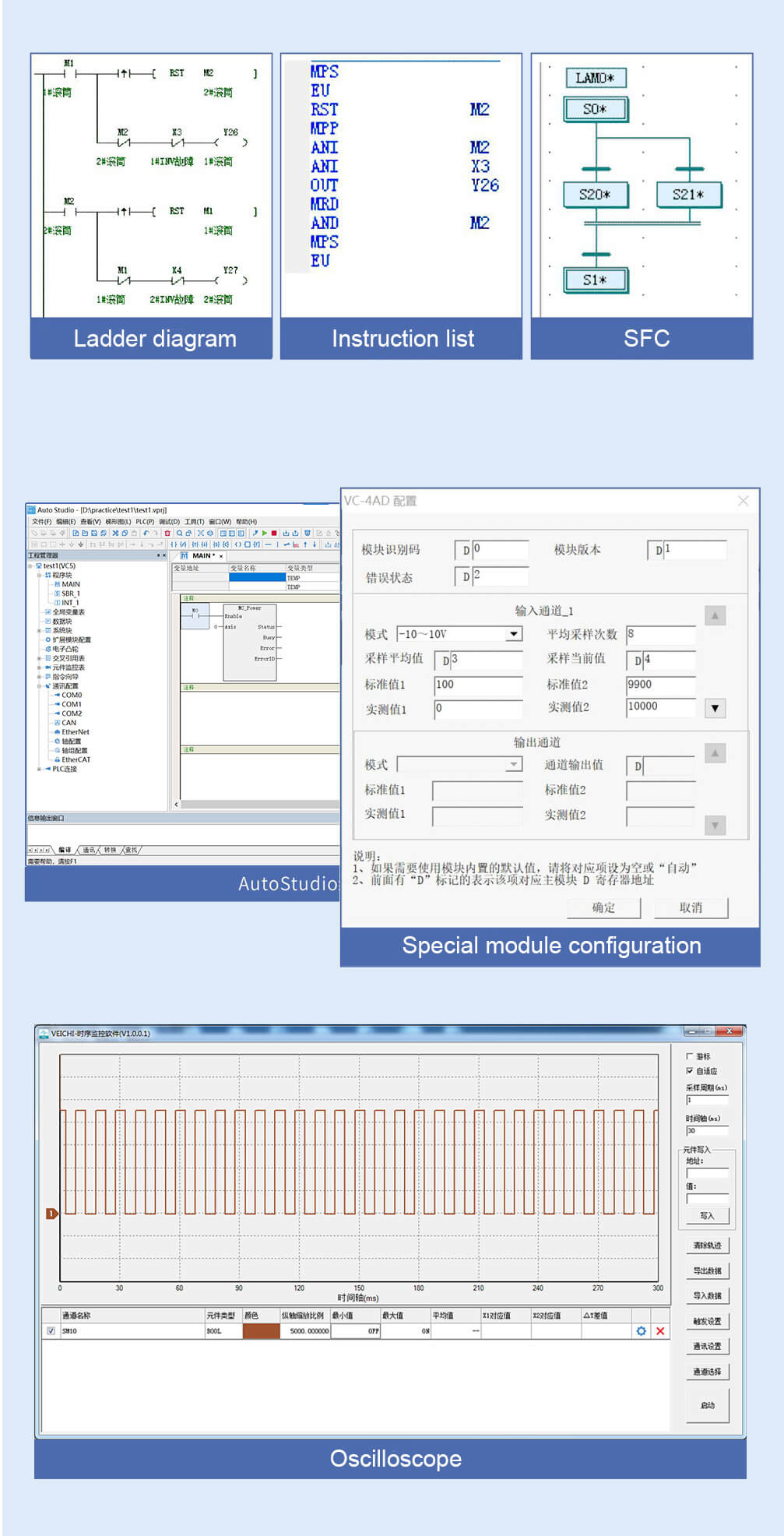
Tout nouveau logiciel de programmation PC
Plusieurs langages de programmation sont commutés et la programmation ouverte est plus facile à manipuler.
1. Prend en charge plusieurs langages de programmation et leur conversion mutuelle.
2. Définissez rapidement des paramètres de commande complexes.
3. Prise en charge de la programmation des blocs fonctionnels.
4. Instructions des blocs fonctionnels LD, SFC, FB et autres méthodes de programmation.
5. Générez et exécutez automatiquement des sous-programmes.
6. Prise en charge du débogage de la fonction oscilloscope.
7. Fonction d'enregistrement des défauts historiques.
Vidéo PLC hautes performances avec bus EtherCAT série VC5
Caractéristiques
| Capacité du programme | 64 Ko |
|---|
| Vitesse de commande de base | 0,065μs |
|---|
| Entrée haute vitesse | 8 canaux*200 kHz |
|---|
| Sortie haute vitesse | 8 canaux*200 kHz |
|---|
| Filtrage numérique | X0~X7 adopte un filtre numérique réglable |
|---|
| Stockage hors tension | 48 000 mots |
|---|
| Communication série COM | Port de communication bidirectionnel COM0:RS232 COM1:RS485< /span> |
|---|
| USB | Prise en charge de l'interface USB-Type-C |
|---|
| CANopen | Port de communication CAN intégré (La station maître prend en charge un maximum de 64 configurations , et la station esclave prend en charge un maximum de 8 PDO) |
|---|
| Ethernet | Port de communication Ethernet intégré Téléchargement et téléchargement de programme, Modbus-TCP Prend en charge jusqu'à 16 connexions esclaves |
|---|
| Type d'extension de communication gauche | Prise en charge de l'extension RS-485 à 1 canal |
|---|
| Type de module d'extension droit | Un maximum de 15 modules sont pris en charge, dont un maximum de 8 modules spéciaux sont pris en charge |
|---|
| Commande de positionnement | Ajout de plusieurs types de fonctions de positionnement |
|---|
| Horloge en temps réel | Support |
|---|
| Accélération et décélération en courbe en S | Support |
|---|
| Commande d'interpolation | Prise en charge de l'interpolation linéaire à deux axes et circulaire à deux axes |
|---|
| Caméra électronique | Prise en charge de la caméra électronique à 4 axes |
|---|
| Cisaille volante/cisaille volante non standard | Prise en charge de la cisaille volante/cisaille volante à 4 axes |
|---|







 Laisser un message
Laisser un message